




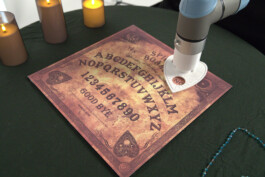





The Living Canvas by Zoe Finkenzeller, Daniel Kroul and Xuanjun Chen attempts to reframe robots and AI as creative collaborators. By mirroring the painters emotions in the movement of the canvas, it forces their creative process to be more expressive.

